Een universele telescoopmontering
(Dit artikel heb ik gepubliceerd in Zenit van maart 2024)
Het aantal assen in een montering
We ervaren de wereld in ruimtelijk opzicht als driedimensionaal. Toch richten we onze telescopen op de hemel voornamelijk met tweeassige monteringen. Laten we even op een rijtje zetten hoeveel assen we kunnen tegenkomen in telescoopmonteringen.
- Nul assen. Radio-interferometers, zoals LOFAR antennes. Niet voor optische waarnemingen.
- Een as. Zenit-kijkers, (roterende vloeibare spiegels) en Meridiaankijkers, bedoeld om de rotatieperiode van de Aarde vast te stellen. Niet bruikbaar voor algemene optische astronomie.
- Twee assen. De algemeen gebruikte altitude-azimutale – en parallactische monteringen.
- Drie (soms 4) assen. Veel gebruikt voor het monitoren van satellieten en raketten.
- Oneindig aantal assen. Het bekendste voorbeeld was Newtons originele montering op een bal. Ook monteringen op hexapods (Stewart-platforms) hebben een oneindig aantal assen.
Een bijzondere, heel kleine categorie vormen de Hobby-Eberly – en SALT-telescopen. Hierbij is de primaire spiegel azimutaal te roteren met een vaste hoogte ten opzichte van horizon. Er is een ‘tracker’ die gedurende beperkte tijd het volgen van een object mogelijk maakt. Deze telescopen zijn in verhouding tot hun afmetingen voordelig te bouwen, maar zijn sterk beperkt in hun mogelijkheden ieder object aan de hemel te volgen.
In dit verhaal wil ik uitleggen hoe en waarom ik denk dat een drieassige montering ideaal is voor algemeen astronomisch gebruik. Daarom neem ik nul- en eenassige monteringen niet op bij mijn vergelijking, ook de Hobby-Eberly en SALT neem ik niet mee omdat deze monteringen niet voor algemeen gebruik geschikt zijn. De eis van ‘ideaal’ wil ik streng hanteren. Niet alleen wil ik intuïtief bewegingsgemak, ik wil ook de mogelijkheid van precies computergestuurd richten en volgen van een object aan de hemel. Om die reden schrap ik ook de bal-montering van Newton (risico van slip) en hexapods (zeer complex in constructie en besturing).
Een ideale montering:
– heeft volledig hemelbereik. Geen blinde plekken op het zenit, nabij de pool of waar dan ook.
– heeft de mogelijkheid ieder object boven de horizon te volgen zonder meridian flips.
– heeft de mogelijkheid circumpolaire objecten doorlopend, oneindig lang te volgen.
– heeft geen last van beeldveld rotatie.
– heeft geen last van roterend afgebeelde diffractie spikes bij lange integraties.
– biedt vrije keuze van beeldveld oriëntatie/ polarisatie oriëntatie / hoek afbeelding diffractie spikes.
– kan zonder mechanische pooluitlijning; GPS en een keer uitrichten op een bekende ster volstaan.
– is intrinsiek te balanceren, er is geen noodzaak voor grote contragewichten.
– heeft het zwaartepunt altijd boven de voet, geen dynamische spanningen in voet of fundament.
– kan toe met kortst mogelijke bekabeling en meest compacte bekabelinggeleidingsystemen.
– kan in het kleinst mogelijke, compact gebouwtje worden ondergebracht.
– is geschikt voor zowel optische telescopen als radio telescopen of antennes.
– biedt bezitters van grotere Newton telescopen de mogelijkheid bij te dragen aan wetenschap.
Zowel de alt-azimutale als de parallactische montering leiden aan een euvel bekend onder de naam ‘gimbal lock’ (sorry, slecht Nederlands). Dit is het bewegingsongemak dat we ervaren wanneer twee assen kleine hoeken met elkaar maken of samenvallen. Zo laat een Dobson montering zich rond het zenit niet intuïtief bewegen omdat de optische as van de telescoop bijna samenvalt met de azimutale as. Hetzelfde geldt ook voor parallactische monteringen wanneer de telescoop vlak bij de hemelpool wordt gericht. Er zijn behoorlijk wat parallactische monteringstypes bedacht, ieder met hun gunstige maar ook ongemakkelijke eigenschappen. Denk aan de ‘meridian flip’, of de noodzaak aan contragewichten. Een alt-azimutale montering voor serieuze astrofotografie vereist een veldderotator rond de optische as, dus eigenlijk komt er toch een derde as aan te pas. Ieder monteringstype heeft zo zijn eigen set van beperkingen. Voor een vergelijking van de types en hun eigenschappen zie figuur 1.
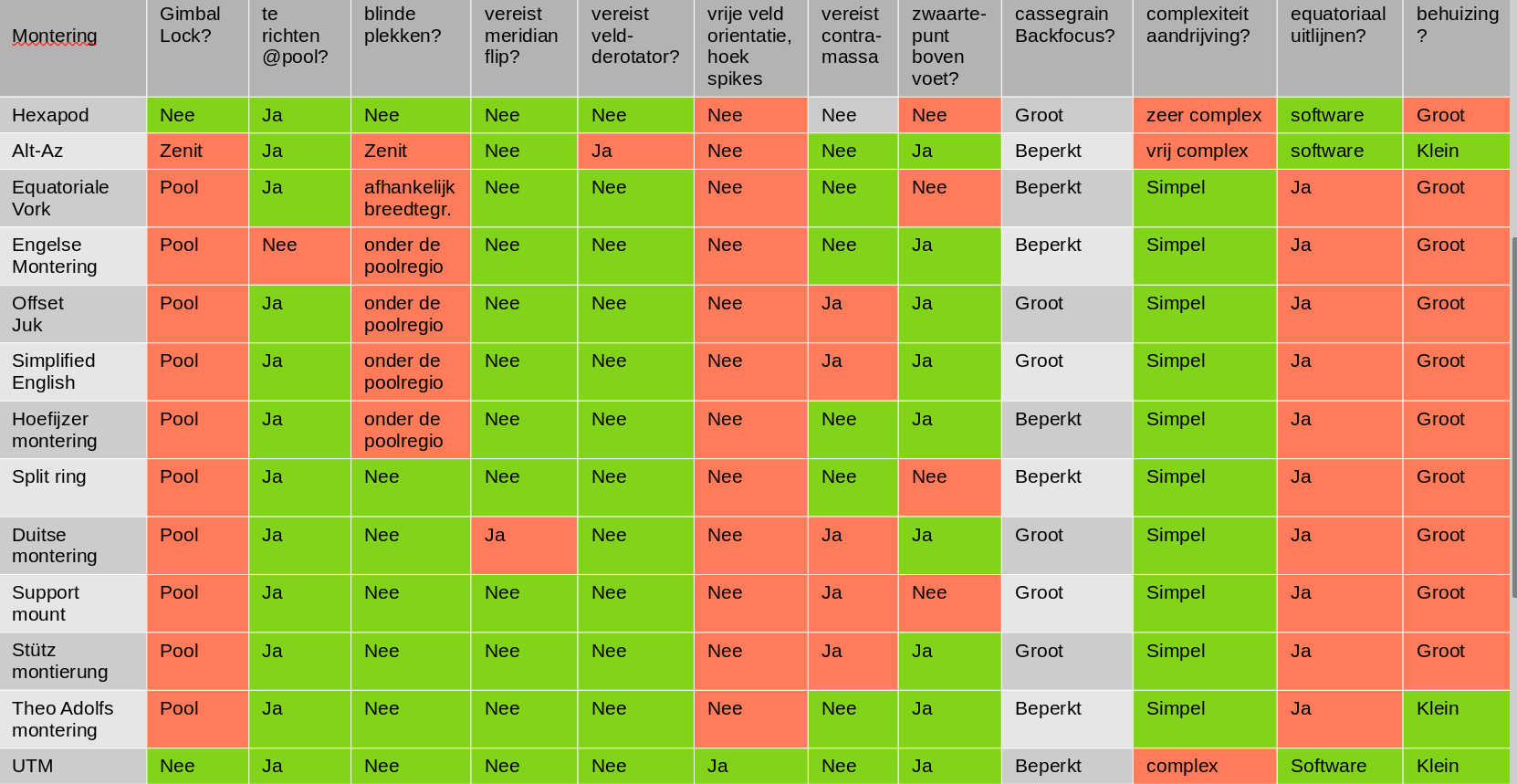
[Figuur 1 geeft een vergelijkend overzicht van eigenschappen van veel gebruikte monteringen voor algemeen astronomisch gebruik.]
Naar een derde as in een telescoopmontering
Dit verhaal zal gaan over ‘echte’ drieassige monteringen. Met een ‘echt’ drieassige montering bedoel ik de constructie van een montering die een telescoop vrij kan dragen en met behulp van een stelsel van drie assen de telescoop naar iedere plek aan de hemel te richten. Daarbij maken de te roteren assen onderling altijd hoeken van 90° met elkaar. De optische as van de telescoop is niet vast gekoppeld met de drie te roteren assen. De richting van de optische as en de hoek van het beeldveld van waar de telescoop naar de hemel wijst zijn dan het resultaat van de drie asrotaties.
Mijn inspiratie om jullie nu te laten nadenken over een drie assige montering is volledig te danken aan een patent van Theo Adolfs. Hij ontwierp een hybride telescoopmontering die alt-azimutale en parallactische eigenschappen verenigde in een uniek ontwerp. Het pincipe is gebaseerd op dat van een kruiskoppeling (cardan-as). De montering is hierdoor in staat om met een enkele aandrijvende motor vier (!) asbewegingen te verkijgen. De aluminum vork waar de telescoop in hangt is voor de breedtegraad verstelbaar en is gericht op de hemelpool. Het is deze constuctie die ervoor zorgt dat de beweging van alle vier assen tot stand komt wanneer ofwel de poolas ofwel de azimutale as wordt aangedreven. Deze montering is geschikt voor astrofotografie met lange intergraties, er is geen veldrototatie en met de juiste software kan de telescoop de hemel met siderische snelheid volgen.
[figuur 2: De hybride montering van Theo Adolfs. Deze montering kan de iedere hemelpositie parallactisch volgen. Cirumpolaire objecten kunnen oneindig lang in beeld gehouden worden.]
Er zijn bij deze montering wel enkele mechanische nadelen denkbaar: niet-lineare wrijving, elastische spanningen in geval van niet ideaal uitgelijnde assen en toenemende niet lineariteit van weerstand en snelheid naar mate de waarneempositie zich dichter bij de evenaar bevind.
Als we nu eens de poolas uit de Adolfs montering weg laten? Dan verdwijnen de nadelen van de kruiskoppeling. Maar als we de montering voor astrofotografie willen blijven gebruiken, dan moet we nu drie assen met zeer grote precisie aandrijven in plaats van een. En dan zodanig dat we het zelfde beeldveld kunnen blijven volgen, zonder veldrotatie. Maar er kwamen nog een paar mooie eigenschappen bij. Zo kunnen we nu – zonder de camera op de telescoop zelf te verdraaien – de oriëntatie van het het object in het beeldveld bepalen, of de hoek van de diffractiespaken ten opzichte van het object vrij kiezen. En we kunnen ook gemakkelijk objecten volgen met afwijkende banen zoals satellieten, planetoïden en kometen. Met de huidige stand van techniek zal het ook nooit meer nodig zijn de montering op de pool uit te richten. En we zullen nooit meer last hebben van gimbal lock. Zo’n ideale drieassige montering verdient een naam die al die eigenschappen duidelijk verwoord, laten we zeggen de Universele Telescoop Montering, kortweg UTM
Het Internet leerde al snel dat ik niet zo origineel was. Drieassige monteringen bestaan al jaren, ze worden alleen erg weinig gebruikt. Ze zien er ook niet allemaal hetzelfde uit. Als succes en bruikbaarheid van een monteringstype af te lezen is aan de aantallen van hun voorkomen, dan moet een drieassige montering een slecht idee zijn. Maar is dat wel terecht? Ik vermoed dat het gezegde “onbekend maakt onbemind” hier op gaat. Handmatig aangedreven drieassige monteringen met bijvoorbeeld Newton telescopen laten zich heel gemakkelijk – intuïtief – bedienen, je kunt het oculair altijd op de gemakkelijkst bereikbare plek hebben. En de ontwikkeling van techniek – nauwkeurige encoders en goedkope, krachtige processors – maken het tegenwoordig mogelijk om drie assen met voldoende precisie aan te drijven zodat er ook astrofotografie gedaan kan worden.
Bestaande drieassige telescoopmonteringen
In 1957 gebruikte de Verenigde Staten de drieassige Baker-Nunn camera al om de Spoetnik satelliet te kunnen volgen. Het grote beeldveld van de camera stelde geen grote eis betreffende de volgnauwkeurigheid. Later kwamen er gevoeligere foto-elektrische detectoren, maar deze hadden een heel klein beeldveld. Nauwkeurig aansturing van drie assen was te moeilijk. Dit werd opgelost met een vierde as.
In de jaren 70 begon de Sovjet Unie in Tadzjikistan met het OKNO project, de bouw van een aantal telescopen op 10 drieassige monteringen, ook met het doel satellieten te kunnen monitoren. Pas in 1994 kwam dit gereed. Het is nu in gebruik door het Russische leger. Deze monteringen zijn uitgerust met nauwkeurige encoders die precieze aansturing van de assen mogelijk maken.

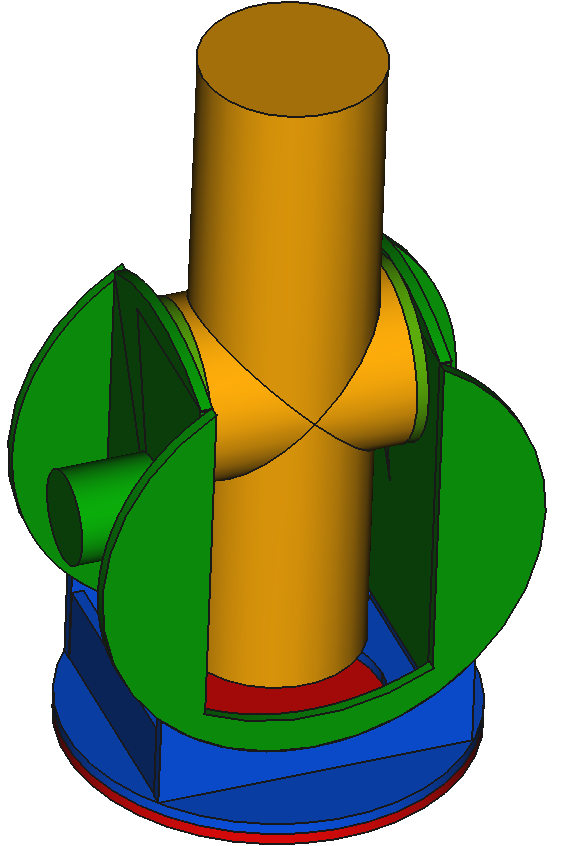
[figuur 3: Een van de Russische OKNO-telescopen. De blauwe constructie links is de behuizing van de as-encoder. Het rode hoefijzer waarin de telescoop hangt wordt door een tandheugel aangedreven beweegt op oliefilm.]
Tracy Wilson toonde in 2004 op het forum van cloudynights zijn drieassige montering. Hij heeft zijn montering volledig gemotoriseerd, maar zonder computergestuurde precisie in de aandrijving. Steve Joiner heeft in 2006 een prachtig werkend simulatieprogramma geschreven om een montering van zoals die van Wilson aan te sturen. De prijs en verkrijgbaarheid van nauwkeurige encoders en processoren hebben toen de ontwikkeling van een astrofotografische montering kennelijk nog in de weg gezeten.
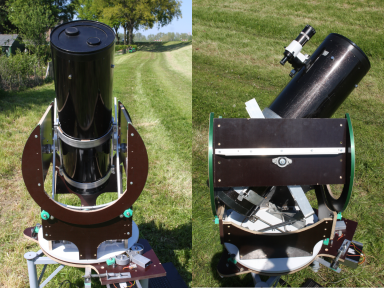
Mel Bartels heeft een drieassige montering gebouwd, bedoeld voor manueel gebruik met een grote Newton telescoop. Het is een Dobson-achtig alt-alt-azimutaal platform waarbij beide altitude-assen wat beperkt zijn in de hoeken die ze kunnen verdraaien. Zijn keuze om de hoekvrijheid te beperken is gunstig voor de constructie en vormt voor visueel gebruik geen enkel probleem.
Denis Moret heeft in 2019 op het Franstalige forum webastro.net beschreven hoe hij een montering bouwt, geïnspireerd op het concept van Tracy Wilson. Ook deze montering mist kennelijk een nauwkeurige computergestuurde aandrijving.
Het succes van een bepaalde type telescoop is evenredig met het aantal exemplaren dat in gebruik is. Newton kijkers behoren tot de populairste telescopen onder amateurs omdat ze vaak uitstekende optische eigenschappen bieden voor weinig geld. We treffen Newton kijkers aan op allerlei tweeassige monteringen. Als een montering al de mogelijkheid heeft om met een Newtonkijker langdurige astrofotografie te doen, dan is deze vaak zeer kostbaar.
Een universele telescoop montering bouwen
Een handmatig aan te drijven montering bouwen is voor iemand die handig is goed te doen. De complexere Adolfs montering is immers ook het resultaat van gedegen handwerk. Je verkrijgt hiermee een Dobson-achtig platform voor een Newton telescoop die zich wel altijd prettig laat bedienen, wat voor object je ook wilt volgen en ook als dit object door het zenit gaat! En je oculair kun je altijd op de gemakkelijkste plek hebben.
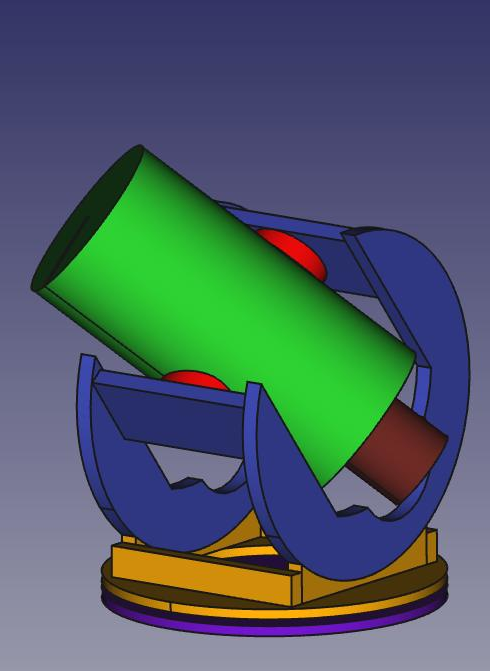
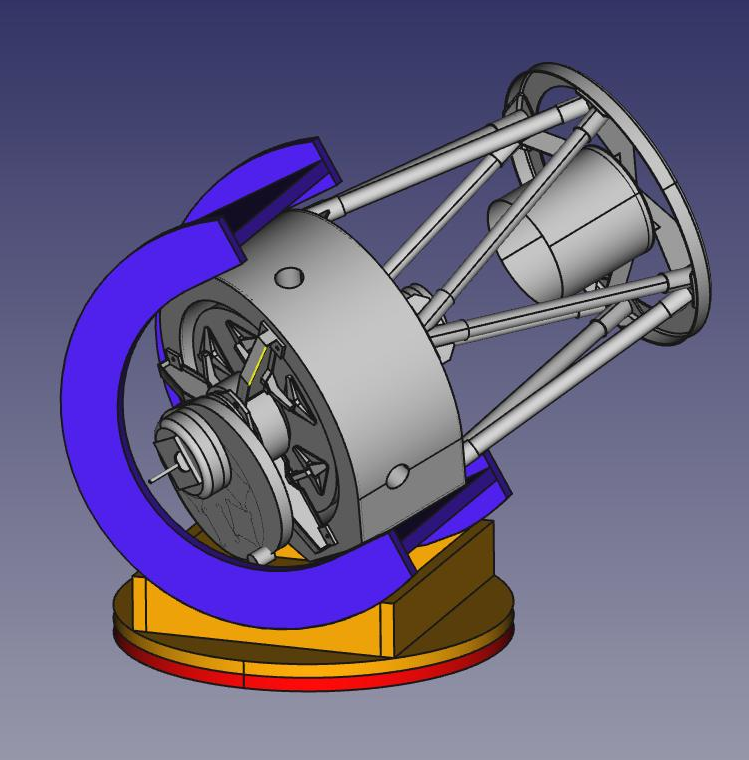
[figuur 4: Een schets van hoe een UTM er uit kan zien voor een 25 cm f/4,7 Newton telescoop.]
[figuur 5: idem, voor een 35 cm SCT.]
[figuur 6: idem, voor een 65 cm f/5,5 MDK (ontwerp BlackGEM telescope, Harrie Rutten/Techno Centrum RU Nijmegen)]
Een computergestuurde – goto – montering is vandaag de dag ook goed mogelijk. Motoren met voldoende kracht en precieze encoders zijn nu goed betaalbaar. Om de motoren met de juiste hoeksnelheid de assen te laten bewegen hebben we nog een behoorlijk stuk software nodig en een niet te onderschatten hoeveelheid rekenkracht. Tegenwoordig kunnen we het complexe rekenwerk voor de vereiste as-snelheiden toevertrouwen aan een Raspberry PI. We hebben het gemak dat we kunnen putten uit broncode die Steve Joiner al in 2004 bekend maakte met zijn “Three-axis Telescope Control” software. In die Rasberry PI moet nog een interface gecreeerd worden naar een planetarium programma. Die kan lokaal in die Raspberry PI aanwezig zijn. Voor het gebruikersgemak kan er nog een interface gecreerd worden om de montering te richten. Je zou dat met de tilt-sensors uit een smartphone kunnen doen of met zo’n Wii-nunchuk (kleine handcontroller). De Raspberry PI stuurt vervolgens voor ieder as de vereiste hoeksnelheid als instructie naar kleinere processors (bijvoorbeeld uit de Arduino-familie) voor de tijdskritische en nauwkeurige motoraansturing.
Natuurlijk zijn we er dan nog niet. Om de gegenereerde kracht van de motor op een as over te brengen moeten we kiezen hoe we dat gaan doen. Het toe te passen type motor is hier ook van belang. Voor twee assen – de azimutale as en de as waarmee de telescoop in de ‘wieg’ hangt – kunnen we vertrouwen op beproefde worm-wormwiel combinaties, maar dat ligt niet voor de hand wanneer we het grote hoefijzer aan willen drijven. We zouden hiervoor een tandheugel aandrijving kunnen gebruiken zoals in de OKNO-telescopen, maar ook bijvoorbeeld frictieaandrijving is hier toe te passen.
Een ander belangrijk punt is natuurlijk dat we van iedere as doorlopend moeten weten onder welke hoek deze verdraaid staat. Het gemakkelijkste is dat te doen met (absoluut) enccoders, maar die zijn nog steeds nogal kostbaar. De encoder op de as door het vlak van de hoefijzers vergt een bijzondere oplossing, anders kan de zelfde constructie van de OKNO telescoop gebruikt worden. Op zijn minst moeten we vaste referentiepunten op iedere as hebben waarvandaan de software kan bij houden hoever deze verdraaid is, en uiteraard moeten er eindstops op de twee altitude assen zijn.
We kunnen dus een montering bouwen die probleemloos de grotere telescopen van amateurs kan dragen. Als we lengte-, breedtegraad en tijd kennen, en we weten met voldoende nauwkeurigheid onder welke hoeken we onze assen moeten verdraaien om een bepaalde ster in beeld te krijgen, dan zijn we meteen klaar met het ‘uitlijnen op de pool’. Meer is niet nodig om vanaf dat moment alle posities aan de hemel te vinden.
Ik ben bezig een website samen te stellen voor de geïnteresseerden waarin ik gegevens wil delen om zo’n montering te kunnen bouwen. Kijk hiervoor op https://universaltelescopemount.com.
Heb je vragen tips, of ideeën, mail mij, m.fokker@astro.ru.nl.
Bronnen:
Baker-Nunn (De eerste drieassige telescoop montering, in staat om de Spoetnik satelliet te volgen.)
OKNO (Door de Amerikaanse federatie van wetenschappers samengesteld over Russisch satelliet observatie systeem.)
Steve Joiner’s Three axis Simulator (De software in C geschreven om simulaties te doen van een drieassig aangedreven montering.)
threeAxisMounts (De drie assige telescoopmonteringsversie van Mel Bartels.)